


Il est admis que le positionnement correct tri dimensionnel des implants est un des facteurs déterminants du succès implantaire à court, moyen et long terme.
Les règles de positionnement sont, en fonction du type d’implant que l’on utilise, bien codifiées. Elles se définissent à partir du projet prothétique qu’il convient préalablement à tout acte implantaire, de parfaitement concevoir et valider. Le positionnement est dicté à la fois par des impératifs biologiques et des impératifs prothétiques. Les impératifs biologiques prennent en compte le déficit de vascularisation péri-implantaire du fait de la perte de l’apport vasculaire desmodontal. Il s’agit de ménager des épaisseurs tissulaires suffisantes pour permettre la vascularisation intrinsèque de l’os et de la muqueuse péri-implantaire, et donc leur trophicité. Les impératifs d’ordre prothétiques imposent un positionnement des implants compatible avec le choix du mode d’assemblage (vissé ou scellé) et avec des profils d’émergence qui ne soient pas en surcontour prothétique, tout en ménageant assez de place pour des tissus mous plus épais.
Le traitement implantaire comporte ainsi plusieurs phases :
- conception prothétique et réalisation d’une maquette du projet prothétique
- mise en concordance de ce projet prothétique et de l’anatomie du patient (imagerie 3D)
- planification implantaire en respectant les règles de positionnement tri dimensionnel
- report de la planification en bouche et mise en place des implants, associée à d’éventuelles procédures d’augmentation de volume osseux
- réalisation prothétique.
La méthode conventionnelle consiste à réaliser, sur des modèles d’étude, des cires diagnostiques (wax-up), dont le but est de définir un schéma occlusal ainsi qu’un projet prothétique utilisé comme référence du traitement. Ce projet ainsi défini, sert à la réalisation d’un guide d’imagerie que le patient porte lors de l’examen radiologique, le plus souvent un CBCT. L’opérateur dispose alors des éléments permettant la planification implantaire. Il est ainsi possible, à l’aide de calques implantaires superposés aux planches de reconstructions radiographiques, de choisir le diamètre et la longueur des implants en accord avec le projet prothétique et le volume osseux. Le guide d’imagerie est transformé en guide chirurgical qui permet, avec plus ou moins de précision, de reporter la planification en bouche lors de la mise en place des implants. Lorsqu’il existe un décalage entre la position des implants et le projet prothétique, la réalisation prothétique devient alors compliquée, car elle doit, tout en restant harmonieuse sur les plans fonctionnel et esthétique, tricher en rattrapant ce décalage.
La méthode conventionnelle tend aujourd’hui à être progressivement remplacée par des techniques utilisant l’informatique. Le numérique peut intervenir à tous les stades du traitement implantaire. La réalisation du projet prothétique, sa superposition avec l’imagerie, ainsi que la planification implantaire sont communes à tous les systèmes informatisés d’aide à la mise en place d’implants. Ces techniques seront décrites brièvement. En revanche, lorsqu’il s’agit de reporter en bouche les données de la planification implantaire, les méthodes diffèrent. Il en existe deux grands types :
- la robotique semi-active qui utilise des guides stéréolithographiques, soit pour guider simplement le foret pilote, soit pour guider l’ensemble de la séquence de forage.
- la robotique passive, ou navigation chirurgicale ou encore navigation dynamique, dont le système pionnier fut le système Robodent. Ces dispositifs, très séduisant présentaient au départ une certaine complexité d’utilisation, ainsi que quelques inconvénients que les nouveaux systèmes, apparus depuis environ deux ans, ont largement corrigé.
Cet article se propose de présenter un de ces systèmes de navigation dynamique : le système X-Guide, X-Nav Technologies, LLC, Lansdale, Pa
Conçu par des cliniciens et des ingénieurs de haut niveau de la société X-Nav, et apparu en 2015, ce système de robotique passive marque un progrès important par rapport aux générations précédentes. Il permet à la fois la planification implantaire et le report de la planification en bouche.
Le logiciel comporte 2 volets : un de planification, l’autre de chirurgie.
Planification
Un dispositif repérable radiologiquement (X-Clip) qui sert ensuite à faire le lien entre la radiographie et le système de robotique est d’abord préparé et inséré en bouche. Le patient passe alors le CBCT. Le X-Clip, qui est la pièce clé du système, est particulièrement bien conçue et facile à manipuler. Il est capital qu’il soit fermement clippé sur l’arcade et qu’il soit possible de le repositionner à plusieurs reprises de façon univoque. Le X-Clip contient 3 billes métalliques qui seront reconnues par le système. Il est thermoformé sur les dents (3 suffisent) Fig. 1.
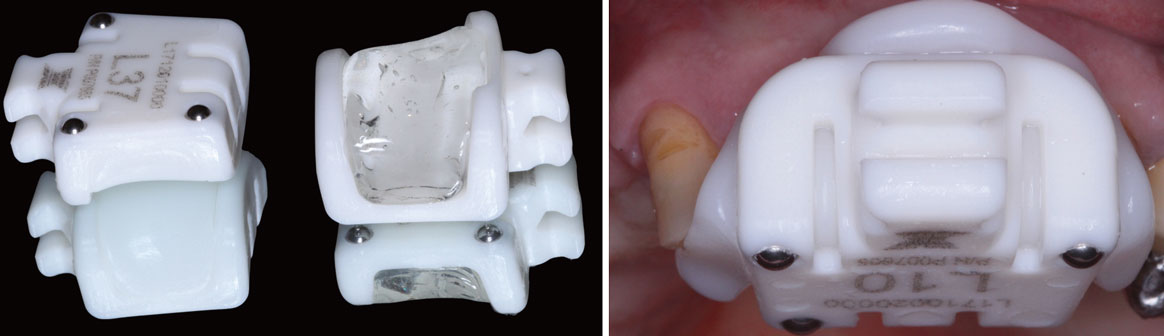
Fig 1 : X-Clip : le matériau thermo-formable permet de clipper le dispositif de façon stable, précise et reproductible
Il présente une encoche qui permet de fixer, lors de la chirurgie, le « tracker patient » Fig. 2.
Fig 2 : le « tracker patient » est associé au X-Clip.
Après importation dans le système du fichier numérisé de l’examen radiographique tri dimensionnel (fichier DiCom), le logiciel de planification demande, comme tous les systèmes de planification, de dessiner une ligne panoramique qui permet de générer les coupes coronales. Il est ensuite possible de repérer et de marquer les obstacles anatomiques, ce qui n’est vraiment utile que pour le canal mandibulaire.
A ce stade, il n’est visible sur l’écran que les coupes et la reconstruction en volume du cone beam, mais on ne dispose d’aucune information sur la topographie des tissus mous, ni sur le projet prothétique. Pour ce faire, il est possible d’importer des fichiers STL et de les superposer sur le fichier DICOM. Les 2 modélisations 3 D apparaissent en parallèle et il suffit de repérer des points remarquables (sommet cuspidien, pointe canine par exemple), 3 suffisent, pour que l’alignement soit effectif Fig 3.
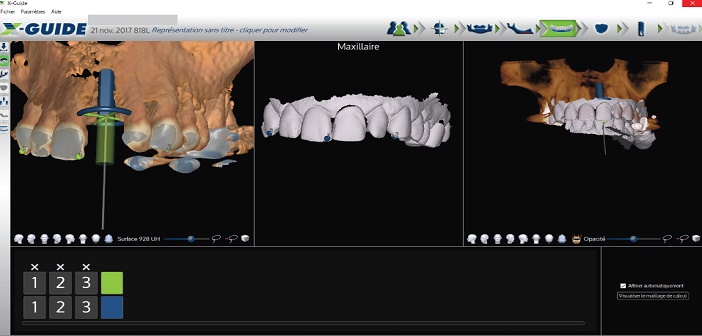
Fig 3 : à gauche le CBCT, au milieu le fichier STL, à droite, les fichiers superposés grâce à 3 points communs
L’obtention d’un fichier STL nécessite une numérisation qui peut être réalisée, soit via un scanner de table au laboratoire à partir d’un modèle en plâtre, soit directement en bouche à partir d’une empreinte optique intra-orale.
Plusieurs cas de figure sont envisageables :
- superposer sur le fichier DICOM, le fichier STL de l’arcade qui présente l’édentement. On importe alors également le fichier de l’arcade antagoniste qui se place automatiquement en occlusion. Dans ce cas, il faudra ensuite utiliser le module du logiciel qui permet de dessiner le projet prothétique.
- Superposer sur le fichier DICOM, le fichier STL incluant le projet prothétique. Ce projet peut, dans des cas d’édentements de faibles étendues être réalisé virtuellement à partir d’un logiciel de CAO de laboratoire. Dans de nombreux cas, il est intéressant d’essayer en bouche le projet prothétique pour en vérifier l’intégration fonctionnelle et esthétique. La meilleure procédure est alors de superposer sur le fichier DICOM, la numérisation de ce montage directeur pré-implantaire.
Pour les édentements de faible étendue, il est possible de placer, en 3 D, des dents modélisées adaptables dans toutes leurs dimensions, et de les incorporer précisément au reste de l’arcade.
Quelle que soit la méthode choisie, le principe est d’obtenir sur des mêmes vues les éléments de l’anatomie du patient, les paramètres dentaires et muqueux sans artéfacts, et le projet prothétique.
Cet ensemble de données permet de préciser le diagnostic. On peut ainsi savoir si les volumes osseux et muqueux sont suffisants. Cela permet également de poser l’indication d’une éventuelle chirurgie d’augmentation de volume osseux et/ou muqueux, ou d’anticiper, comme dans certains cas, la nécessité d’une ostéoectomie pour augmenter l’espace prothétique ou pour aligner les collets cliniques.
Cette phase d’analyse est déterminante pour positionner correctement l’implant au sein du tissu osseux, en fonction d’un projet prothétique pré établi.
La planification a donc un rôle diagnostic capital.
Riche de ces informations, on peut alors utiliser l’onglet de positionnement implantaire. Cette fonctionnalité permet de positionner l’implant en tenant compte de l’ensemble des paramètres cliniques.
- Collet clinique de la dent à remplacer
- Topographie muqueuse
- Espace mésio-distal
- Position des dents antagonistes et schéma occlusal
- Volume osseux
Le logiciel n’a pas prévu de bibliothèque d’implant, souvent longue, incomplète et fastidieuse, mais objective la forme de l’implant par un cylindre dont on règle très aisément la longueur, le diamètre coronaire et le diamètre apical. La position de l’implant apparait dans tous les plans de l’espace et on peut la modifier simplement en cliquant dessus.
Les implants sont entourés de 2 halos respectivement de 1,5 mm et de 3 mm qui simplifient leur positionnement par rapport aux dents naturelles ou bien entre eux. Leurs axes sont prolongés en direction coronaire, cela objective le point d’émergence dans le volume du projet prothétique. Une fois sciemment positionnés, il est recommandé de les verrouiller pour éviter tout déplacement intempestif Fig. 4.
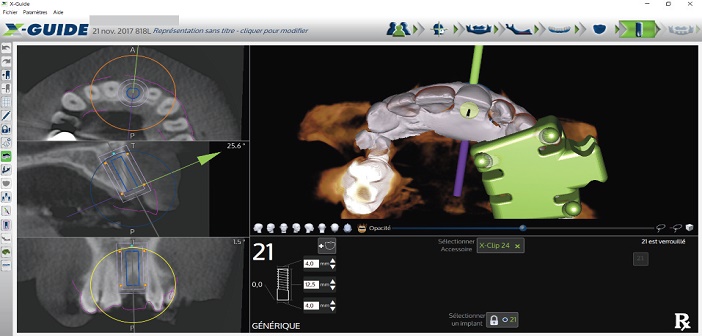
Fig 4 : la position tridimensionnelle de l’implant est précisée par rapport au projet prothétique.
Le cas est prêt pour la chirurgie. Un clic suffit pour passer dans la partie la plus innovante de ce système.
Chirurgie
Pour transférer précisément la position des implants planifiés lors de la chirurgie, le système fonctionne comme un GPS à l’échelle de la bouche, et se compose :
- d’un dispositif de télémétrie qui détecte en temps réel, la position exacte des trackers solidarisés au patient d’une part (tracker patient), et au contre angle d’implantologie d’autre part. Ce dispositif de télémétrie, contenu dans un boitier est disposé au-dessus du patient comme un scialytique. Ce boitier contient également 2 caméras et une source de lumière bleue. La lumière bleue permet de détecter les trackers en les mettant en surbrillance. Les caméras, très proches des dispositifs de télémétrie filment la scène sous deux angles différents et permettent de comprendre très vite si un élément s’interpose dans le champ du dispositif de télémétrie.
- des 2 trackers, un associé au patient par l’intermédiaire du X-clip, l’autre associé au contre angle chirurgical Fig. 5 et 6.
Fig 5 : vue de l’ensemble du système avec la caméra de télémétrie et les 2 trackers. L’opérateur regarde l’écran alors que l’aide opératoire contrôle le bon déroulement de l’intervention. Fig 6 : tracker monté sur le contre angle d’implantologie
L’ensemble des éléments est calibré au début de chaque chirurgie.
Le foret monté sur le contre angle est présenté au système par l’intermédiaire d’une plaque en céramique appelée Go-Plate Fig. 7.

Fig 7 : présentation du foret au système sur la Go-Plate.
On connait ainsi à tout moment la position de la pointe du foret par rapport à l’os alvéolaire et au projet prothétique.
L’écran est divisé en plusieurs parties :
- un système de cible constitué de 3 éléments : un point bleu correspondant à l’émergence de l’implant, un cylindre qui correspond à l’axe de l’implant, une jauge de profondeur disposée autour de la cible.
- Les reconstructions multiplanaires (coupes MPR), sur lesquelles on peut voir la planification implantaire, le contour du fichier STL du projet prothétique et le contour virtuel du foret.
Le retour vidéo des 2 caméras montrant que le système fonctionne correctement. On peut y voir les trackers en surbrillance. Cela permet de régler la distance et l’orientation de la caméra de télémétrie, et aussi de comprendre très rapidement ce qui pourrait, lors du forage, s’interposer dans son champ.
- les données de planification Fig. 8.
Avant tout forage, il est recommandé et très intéressant, car c’est la grande force du système, de contrôler que la superposition des données radiographiques et de la réalité du patient est parfaitement effective grâce au positionnement correct du « tracker patient » par l’intermédiaire du X-Clip.

Fig 8 : écran de navigation avec les différentes données utiles.
Cette étape, très rapide, permet, en pointant le foret sur un élément anatomique connu (par exemple le bord libre d’une dent, ou un sommet cuspidien), de contrôler sur les coupes MRP, que le foret y pointe exactement le même détail anatomique Fig. 9.
Tout décalage signifierait que le X-Clip n’était pas positionné exactement de la même manière lors du CBCT et lors de la chirurgie. Il serait alors possible de redresser le « tracker patient » jusqu’à que la position réelle et la position sur l’écran coïncident.
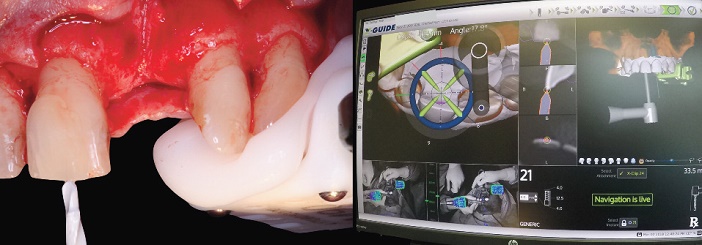
Fig 9 : le pointage du foret sur un élément anatomique connu permet de contrôler la précision de l’intervention
Le forage peut alors être exécuté. D’abord, on s’assure que le point d’émergence est correct. Ensuite, on redresse l’axe de forage en se laissant guider par le cylindre sur la cible. On suit la progression du forage grâce à la jauge circulaire de profondeur et aussi grâce aux coupes MRP qui montrent où se situe la pointe du foret dans le tissu osseux Fig. 10.
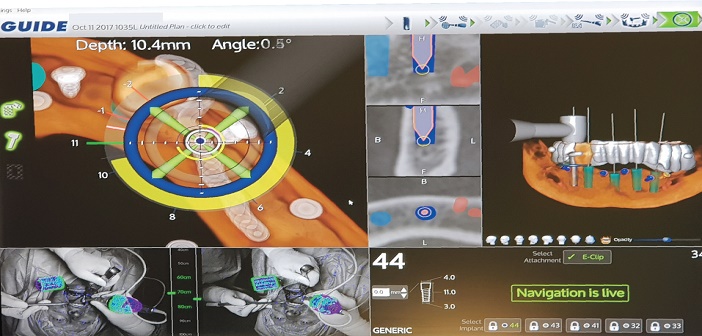
Fig 10 : le forage est guidé par les informations figurant sur l’écran.
Le contrôle de la précision du système permet la confiance de l’opérateur qui dissocie le regard du geste. Si l’opérateur fore en regardant l’écran, son aide opératoire, elle, véritable copilote, contrôle en permanence le bon déroulement de l’intervention avec un regard direct en bouche. C’est un élément intéressant de cette procédure qui renforce la cohésion et la synergie de l’équipe chirurgicale.
Une fois la séquence de forage terminée, il est possible de se laisser guider également pour la mise en place de l’implant.
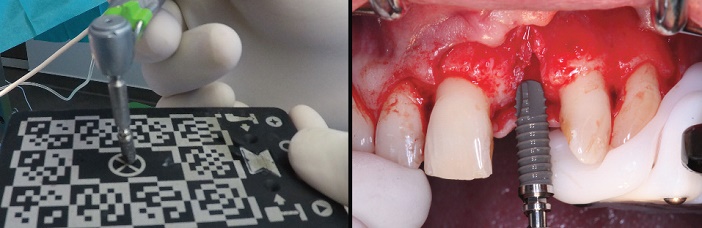
Fig 11 : l’implant (Thommen®) est vissé en suivant le même guidage.
Au lieu de présenter le foret sur la Go-Plate, on présente alors l’implant monté sur le porte-implant sur contre angle Fig. 11. La chirurgie peut alors être éventuellement complétée Fig. 12.
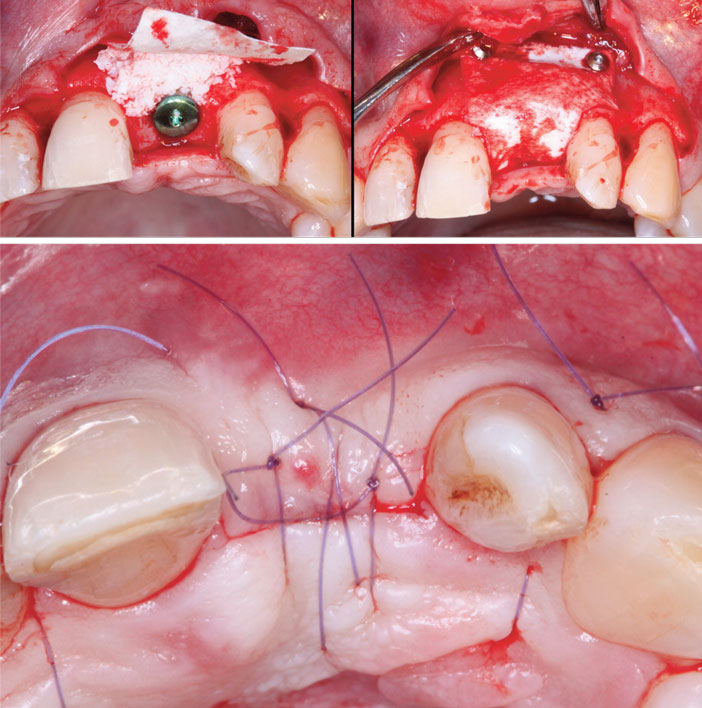
Fig 12 : les chirurgies additionnelles sont facilement compatibles avec le système X-Guide. Fig 9 : le pointage du foret sur un élément anatomique connu permet de
Précision
Plusieurs études montrent que ce système est précis. Largement plus précis bien entendu que la mise en place d’implants sans guide1. Plus précis aussi que la mise en place d’implant à main levée avec un guide réalisé par le laboratoire de prothèse découlant du wax-up et du guide radiologique2, 3. Au moins aussi précis que les implants placés avec des guides stéréolithographiques, ou avec d’autres systèmes de navigation chirurgicale4, 5, 6, 7.
Force du système
La navigation chirurgicale avec le système X-Guide présente plusieurs avantages par rapport aux systèmes alternatifs.
Sa précision est suffisante pour que le positionnement tridimensionnel corresponde au cahier des charges commun à tout positionnement implantaire, autant d’un point de vue biologique que d’un point de vue prothétique.
Le processus général de mise en oeuvre est bien codifié et rapide. Le système est utilisable dans toutes les indications, sur tous les patients, et son utilisation est généralisable à l’ensemble des chirurgies implantaires d’un cabinet, même les plus routinières.
L’ensemble de la procédure dure environ 15 minutes et comprend donc le positionnement du X-clip thermoformé, l’empreinte optique permettant d’élaborer le projet prothétique, l’acquisition radiologique et la planification implantaire. Même si une courbe d’apprentissage d’une vingtaine de chirurgies implantaires est nécessaire, le processus est assez facilement intégrable dans l’organisation de l’activité.
Le parfait fonctionnement du système est vérifiable, et doit être vérifié avant chaque forage. C’est là l’indéniable supériorité de la navigation dynamique, puisqu’avec la robotique semi-active (guides stéréolithographiques), les erreurs ne peuvent être objectivées qu’une fois commises. Ici, on connait à tout moment et en temps réel le positionnement de l’extrémité du foret au sein de l’os.
Le site opératoire est dégagé. Cela permet le contrôle du geste opératoire, l’effectivité de l’irrigation, mais permet surtout à l’aide opératoire de vérifier et contrôler directement le déroulement correct de l’intervention.
Le rôle des aides opératoires est ainsi primordial et concourt au renforcement de la cohésion de l’équipe soignante en donnant un rôle important à chacun.
Il est aussi aisé de moduler l’acte chirurgical en fonction du contexte local et donc d’adapter le tracé d’incision qui peut parfois être moins invasif, ou de réaliser des chirurgies additionnelles à la pose d’implant comme des augmentations per-implantaires de volume osseux et/ou muqueux.
Enfin, et contrairement à ce que l’on penserait intuitivement, ce sont des procédures économiques par rapport aux solutions de guidages de poses d’implants alternatives. Mais ce sont des procédures économiques aussi dans l’absolu au regard de l’amélioration de la prédictibilité du résultat qu’elles rendent possible pour chaque implant placé.
Conclusion
La navigation dynamique, grâce à l’amélioration des performances informatiques, a fait de larges progrès ces dernières années. Le système X-Guide est aujourd’hui parfaitement opérationnel. Bien évidemment, cette technologie continuera à évoluer, mais d’ores et déjà, elle présente de nombreux atouts.
Facile à intégrer à l’organisation quotidienne d’un cabinet, elle est simple et rapide à utiliser. Il est donc possible de généraliser à tous les patients une démarche thérapeutique permettant d’anticiper les difficultés du traitement en dessinant en premier lieu un projet prothétique fixant l’objectif du traitement, une planification implantaire cohérente par rapport au projet prothétique, et enfin un exact report en bouche de la thérapeutique planifiée. Ce processus, en outre, facilite les éventuelles chirurgies complémentaires sur les tissus durs et/ou les tissus mous. Il facilite aussi la phase prothétique de la thérapeutique implantaire et au final, améliore la qualité des traitements, tant sur le plan biologique que mécanique.
Bibliographie
1. Brief J, Edinger D, Hassfeld S, Eggers G. Accuracy of image-guided implantology. Clin Oral Implants Res. 2005;16:495–501.
2. Block MS, Emery RW, Cullum DR, SheikhImplant A. Placement is more accurate using dynamic navigation. J Oral Maxillofac Surg 75:1377-1386, 2017
3. Block MS, Emery RW, Lank K, Ryan J. Implant placement accuracy using dynamic navigation. Int J Oral Maxillofac Implants. 2017 Jan/Feb;32(1):92-99.
4. Emery RW, Merritt SA, Lank K, Gibbs JD. Accuracy of dynamic navigation for dental implant placement–Model based evaluation. J Oral Implantol. 2016 Oct;42(5):399-405.
5. Tahmaseb A, Wismeijer D, Coucke W, Derksen W.Computer technology application in surgical implant dentistry: a systemic review. Int J Oral Maxillofac Implants. 2014;29(suppl):25–42.
6. Somogyi-Ganss E. Evaluation of the Accuracy of NaviDent, a Novel Dynamic Computer–Guided Navigation System for Placing Dental Implants [master’s thesis]. Toronto, Canada: Graduate Department of Prosthodontics, University of Toronto; 2013.
7. Jung RE, Schneider D, Ganeles J, Wismeijer D, Hammerle C. Computer technology application in surgical implant dentistry: a systematic review. Int J Oral Maxillofac Implants. 2009;(suppl):92–109.





{kind=link}